-
OpticalCamouflage
- 1998
- 2004
- 2010
- display
- sight
- AR/MR/DR
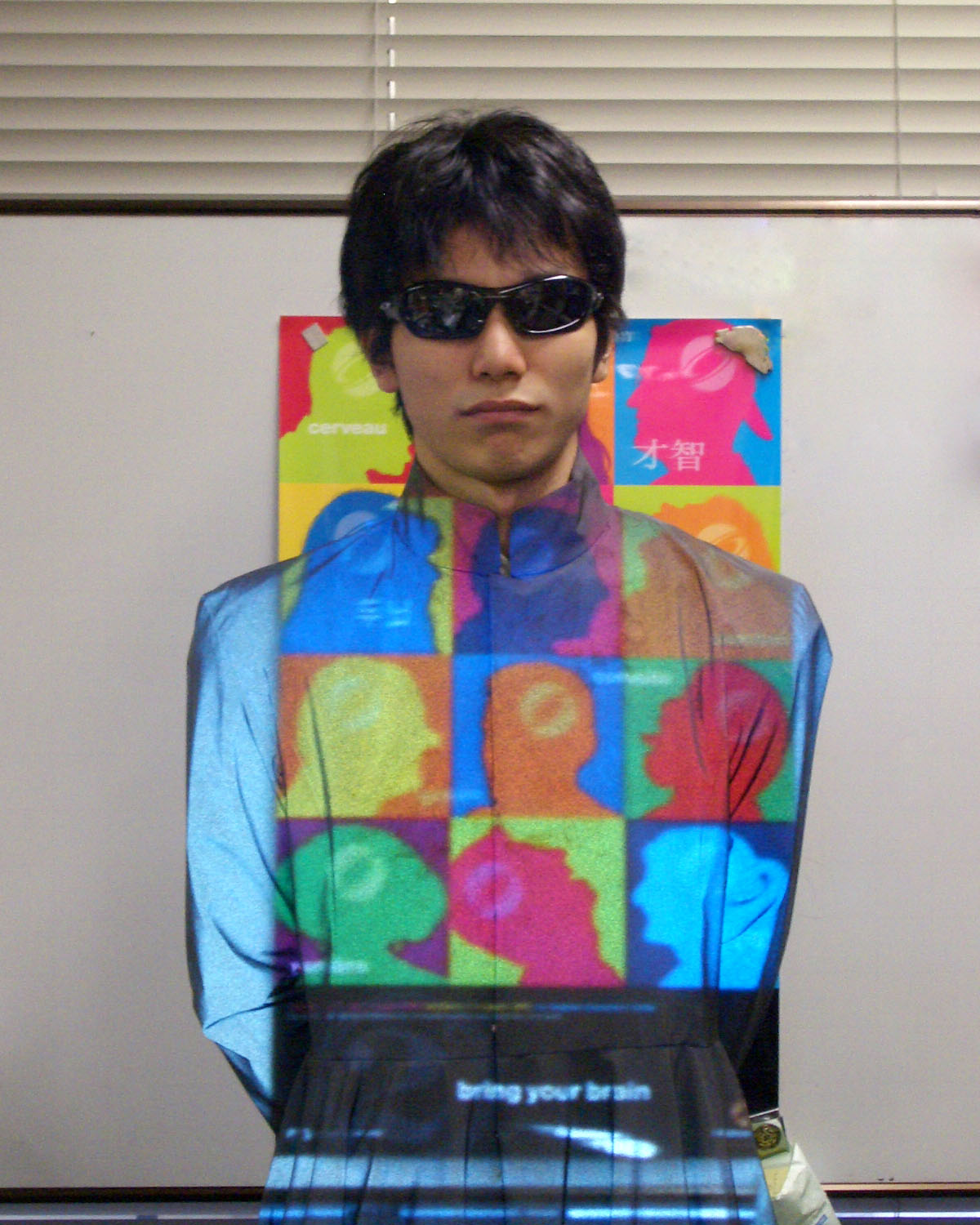
Abstract Optical Camouflage uses the Retro–reflective Projection Technology, a projection–based augmented–reality system composed of a projector with a small iris and a retroreflective screen. The object that needs to be made transparent is painted or covered with retroreflective material. Then a projector projects the background image on it making the masking object virtually transparent. 1.
Publication M. Inami, N. Kawakami, Y. Yanagida, T. Maeda and S. Tachi, Method and Device for Providing Information, US PAT. 6,341,869 , 2002 M. Inami, N. Kawakami, D. Sekiguchi, Y. Yanagida, T. Maeda and S. Tachi, Visuo-Haptic Display Using Head-Mounted Projector, Proceedings of IEEE Virtual Reality 2000, pp.233-240, 2000
概要 光学迷彩とはその名の通り物体を光学的にカモフラージュするための技術です. 拡張現実感における一般的な映像提示技術は,現実空間にバーチャル空間の映像を重畳させるいわば映像の「加算」です. 逆に現実空間の物体を視覚的に透明化,すなわち映像の「減算」を可能とする「光学迷彩(Optical Camouflage)」技術を用いることにより実空間内で邪魔な物体を視覚的に消去することが可能となります.光学迷彩は,遮蔽物体に再帰性反射材を貼付した上で, 事前にもしくは実時間で撮影した背景映像をHMPで投影することによって実現します. 背景映像をリアルタイムにカメラで撮影し投影するシステムを構築する場合, カメラ画像をそのままプロジェクタより投影した場合は映像が大きくずれてしまうことにります. よって本手法では背景の簡単なモデルを作成し, プロジェクタの位置での視点映像をIBR(Image-based Rendering) によりリアルタイムに生成しています.
発表文献 M. Inami, N. Kawakami, Y. Yanagida, T. Maeda and S. Tachi, Method and Device for Providing Information, US PAT. 6,341,869 , 2002 M. Inami, N. Kawakami, D. Sekiguchi, Y. Yanagida, T. Maeda and S. Tachi, Visuo-Haptic Display Using Head-Mounted Projector, Proceedings of IEEE Virtual Reality 2000, pp.233-240, 2000
稲見, 川上, 柳田, 前田, 舘, 情報提示方法及び装置, 特開2000-122176, 1998
川上, 稲見, 柳田, 前田, 舘, 現実感融合の研究(第2報)-Reality Fusionにおける光学迷彩技術の提案と実装-, 日本バーチャルリアリティ学会第3回大会論文集, pp.285-286, 1998
稲見, 舘, 視・触覚 複合現実環境提示技術, 計測と制御, Vol.41, No.9, pp.639-644, 2002
参考文献 士郎正宗, 攻殻機動隊, 講談社, 1991 -
Augmented Coliseum
- 2005
- sensing
- sight
- AR/MR/DR
- entertainment
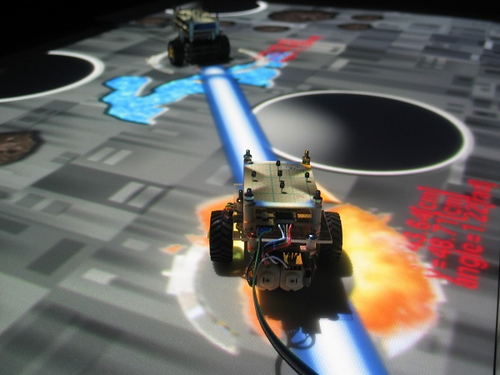
Abstract We propose a novel display–based game environment using augmented reality technology with small robots. In this environment, the small robots can be augmented by a display image according to their positions and postures.The augmentation activity reinforces the fun of playing with such small robots in the real world.
-
Electric Dance Revolution
- 2004
- display
- balance
- AR/MR/DR
- entertainment
発表文献杉本麻樹,永谷直久,新居英明,稲見昌彦,Electric Dance Revolution:前庭感覚刺激による音楽体感システム, エンタテインメントコンピューティング2004論文集, pp.35-38, 2004.
-
Slow Display
- 2010
- display
- sight
- AR/MR/DR
- entertainment
Publication Daniel Saakes, Kevin Chiu, Tyler Hutchison, Biyeun M. Buczyk, Naoya Koizumi, Masahiko Inami, Ramesh Raskar. Slow display. In ACM SIGGRAPH 2010 Emerging Technologies, ACM,New York, NY, USA, SIGGRAPH ’10, 22:1–22:1, 2010. a22-saakes.pdf ACM DL
Links Project web site 4Gamer.net「[SIGGRAPH]製品化前の次世代バーチャルリアリティ技術が盛りだくさん。「Emerging Technologies」展示セクションレポート(2)」 NewScientist ”Future on display: Long-lasting images save on power" -
minirobo
- 2005
- robotics
- multi/cross modal
- tangible
- entertainment
minirobo:A Game Environment Using Small Robots with Mixed Reality
複合現実感技術と小型ロボットを用いたゲーム環境 -
Smart Tool
- 2001
- interaction
- touch
- Augmented Human
- medical
Previous research on augmented reality has been mainly focused on augmentation of visual or acoustic information. However, humans can receive information not only through vision and acoustics, but also through haptics. Haptic sensation is very intuitive, and some researchers are focusing on making use of haptics in augmented reality systems. While most previous research on haptics is based on static data, such as that generated from CAD, CT, and so on, these systems have difficulty responding to a changing real environment in real time. In this paper, we propose a new concept for the augmented reality of haptics, the SmartTool. The SmartTool responds to the real environment by using real time sensor(s) and a haptic display. The sensor(s) on the SmartTool measure the real environment then send us that information through haptic sensation. Furthermore, we will describe the prototype system we have developed.
Publications Takuya NOJIMA, Masahiko INAMI, Ichiro KAWABUCHI,Taro MAEDA, Kunihiko MABUCHI, Susumu TACHI, “An interface for touching the interface”, Conference Abstracts and Applications of SIGGRAPH 2001, Los Angeles, USA , p.125, 2001. (SIGGRAPH, PDF) Takuya NOJIMA, Dairoku SEKIGUCHI, Masahiko INAMI and Susumu TACHI, "The SmartTool: A system for augmented reality of haptics“, Proceedings of IEEE Virtual Reality, (Mar.24.2002), pp.67-72, 2002. (IEEE Xplore, PDF) 野嶋琢也, 関口大陸, 稲見昌彦, 舘暲:力覚提示を利用した実時間実環境作業支援システムの提案, 日本バーチャルリアリティ学会論文誌, Vol.7, No.2, pp193-199, 2002. (CiNii, PDF) 野嶋琢也, 稲見昌彦, 苗村潔, 川俣貴一, 伊関洋, 舘暲: 力覚のオーグメンテッドリアリティを用いた手術支援システムの研究, 日本VR医学会論文誌, Vol.1, No.1, pp.78-82, 2002. (author ver. PDF) 渡邊淳司, 板垣貴裕, 野嶋琢也, 稲見昌彦, 舘暲: Beings - Haptic artwork with SmartTool -, 芸術科学会論文誌, Vol. 2, No. 4, pp. 116-122, 2003. (CiNii, PDF) 野嶋琢也, 関口大陸, 稲見昌彦, 満渕邦彦, 舘暲, 「スマートツール」, 特許第4660679号(平成23年1月14日登録) T. Nojima, D. Sekiguchi, M. Inami, K. Mabuchi and S. Tachi, Smart-tool and method of generating haptic sensation thereof, US Patent Application 20030057973 , 2002
概要 SmartToolとは「触覚におけるオーグメンテッドリアリティ」の研究を通じて生み出されたものです.オーグメンテッドリアリティ(Augmented Reality:AR)とは「現実世界の情報にバーチャルな情報が融合付加された状態」を示す言葉で,電脳コイルのような世界を考えてもらえば良いかと思います.しかし従来は視覚的なAR,つまり現実世界の「映像」にCGなどバーチャルな「映像」が融合付加された状態が主として考えられてきました.そこで我々は特に触覚に着目し,現実の触覚情報にバーチャルな触覚情報を重畳付加する「触覚におけるオーグメンテッドリアリティ」の研究に取り組んできました.このSmartToolではリアルタイムインタラクションを重視し,変化する環境に関する情報をセンサで取得し,その情報を触覚を通じて人に対して提示しています.このとき,現実の触覚情報とセンサ情報からなるバーチャルな触覚情報が融合して提示されることにより,医療などを含む実世界における作業の支援,あるいはエンターテイメントなどへの応用が可能になると考えられています.
発表文献 Takuya NOJIMA, Masahiko INAMI, Ichiro KAWABUCHI,Taro MAEDA, Kunihiko MABUCHI, Susumu TACHI, “An interface for touching the interface”, Conference Abstracts and Applications of SIGGRAPH 2001, Los Angeles, USA , p.125, 2001. (SIGGRAPH, PDF)
Takuya NOJIMA, Dairoku SEKIGUCHI, Masahiko INAMI and Susumu TACHI, "The SmartTool: A system for augmented reality of haptics“, Proceedings of IEEE Virtual Reality, (Mar.24.2002), pp.67-72, 2002. (IEEE Xplore, PDF)
野嶋琢也, 関口大陸, 稲見昌彦, 舘暲:力覚提示を利用した実時間実環境作業支援システムの提案, 日本バーチャルリアリティ学会論文誌, Vol.7, No.2, pp193-199, 2002. (CiNii, PDF)
野嶋琢也, 稲見昌彦, 苗村潔, 川俣貴一, 伊関洋, 舘暲: 力覚のオーグメンテッドリアリティを用いた手術支援システムの研究, 日本VR医学会論文誌, Vol.1, No.1, pp.78-82, 2002. (author ver. PDF)
渡邊淳司, 板垣貴裕, 野嶋琢也, 稲見昌彦, 舘暲: Beings - Haptic artwork with SmartTool -, 芸術科学会論文誌, Vol. 2, No. 4, pp. 116-122, 2003. (CiNii, PDF)
野嶋琢也, 関口大陸, 稲見昌彦, 満渕邦彦, 舘暲, 「スマートツール」, 特許第4660679号(平成23年1月14日登録)
T. Nojima, D. Sekiguchi, M. Inami, K. Mabuchi and S. Tachi, Smart-tool and method of generating haptic sensation thereof, US Patent Application 20030057973 , 2002 -
Smart Finger
- 2002
- interaction
- touch
- Augmented Human
- daily life
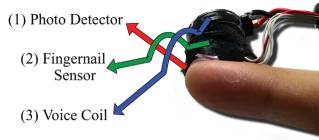
"Smart Finger" is a novel type of tactile display for Augmented Reality (AR) that is wearable, like a press-on fingernail. This device allows the user to feel various textures while tracing his or her fingers along smooth objects. This wearable AR interface can supplement bump mapping information to real objects.
人間は物に触ったときに,硬さやテクスチャを感じ取ります. 私たちの研究では物に触れたときの感覚(触覚)を再現して他の人に伝えることを目指しています. この研究分野では,指の腹側から刺激を与えることで,触覚を再現する方法が主流でした. しかし,この方法では装置に触れていなければ触感は得られません. つまり,バーチャルな触感が与えられているときは現実に存在する物の触感を得ることができません. そこで,指の腹側から刺激を与えるのではなく指の爪側から刺激を与えることで,指の腹側に触覚を再現する方法を利用します.この方法では,バーチャルな触感は指の爪側から,現実に存在する物の触感は指の腹側から与えられるので, これら2つの触感を重ね合わせたものを感じ取ることができます.
Hideyuki Ando, Junji Watanabe, Masahiko Inami, Maki Sugimoto, Taro Maeda“ A Fingernail-Mounted Tactile Display for Augmented Reality Systems, ” Electronics and Communications in Japan, Part II Vol. 90, No. 4, pp. 56-65, 2007.安藤英由樹, 渡邊淳司, 稲見昌彦, 杉本麻樹, 前田太郎 : Augmented Realityのための爪装着型触覚ディスプレイの研究, 電子情報通信学会論文誌. D-II, 情報・システム, II-パターン処理 J87-D-II(11), pp.2025-2033, 2004. -
Stop Motion Goggle
- 2008
- interaction
- sight
- Augmented Human
- entertainment
Stop Motion Goggle (SMG) expands visual perception by al- lowing users to perceive visual information selectively through a high speed shutter. In this system, the user can easily ob- serve not only periodic rotational motion such as rotating fans or wheels, but also random motion like bouncing balls. In this research, we developed SMG and evaluated the effect of SMG on visual perception of high speed moving objects. Furthermore this paper describes users’ behaviors under the expanded visual experience.
動いているモノをくっきりと見るために、シャッターを目に取り付けることで、ストップモーションアニメーション的な効果を実現するものです。人間は左右二つの目があるので、2種類の周波数のシャッターを作成するという実験を実施しました。実は単なるシャッターだけだと、動いているモノをクッキリと見ることは出来るようになるのですが、動きそのもの(例えば動きの軌跡とか)を認識しにくくなってしまう問題があります。そこで周波数を二種類使う方式によって、左右の目の明るさの偏りがない状態で、動きの知覚を保ったまま、動いているモノをクッキリ見せるということに成功しました。
発表文献 Naoya Koizumi, Nagaya Naohisa, Masahiro Furukawa, Maki Sugimoto and Masahiko Inami, "Stop Motion Goggle: Augmented visual perception by subtraction method using high speed liquid crystal", March 8th, Thursday, 2012StopMotionGoggle_AH2012.pdf小泉直也 (慶應義塾大学),永谷直久 (東北大学),古川正紘,杉本麻樹,稲見昌彦 (慶應義塾大学), 異なる周波数で制御された高速シャッターによる視知覚への影響, 第17回バーチャルリアリティ学会論文集, pp419 - 422 (慶應義塾大学日吉キャンパス, 2012年9月14日)
永谷直久, 上間裕二, 古川正紘, 杉本麻樹, 稲見昌彦, Stop Motion Goggle:高速液晶シャッタを用いた視知覚の拡張, 情報処理学会論文誌, Vol 53, No. 4, pp. 1319 – 1327, 2012 -
SUI - Strawlike User Interface
- 2006
- display
- taste
- VR
- foods
The Straw-like User Interface is a novel interface system that allows us to virtually experience the sensations of drinking. These sensations are created based on referencing sample data of actual pressure, vibration and sound produced by drinking from an ordinary straw attached to the system. This research of presenting virtual drinking sensations to mouth and lips is the first in the world to have been attempted, and comes with high academic expectations. Moreover, due to the high sensitivity of the mouth and lips when used as a sensor, it is possible to develop many unique interfaces and so this could facilitate an extension of research fields in both interactive arts and entertainment.
吸引感覚提示装置 -
Robotic UserInterface
- 2006
- robotics
- multi/cross modal
- tangible
- daily life
The concept of using a robot as an interface between the real and information worlds can be referred to as a Robotic User Interface (RUI). In RUI, though the robot is able to be used as an interface that has both input ans and output, the robot was actually often used only as an input device in a previous system. Against this, we develop the system that pays attention to the function of output of visual Information on RUI.
RUI:Robotic User Interface
概要◦ロボティック・ユーザ・インタフェース(Robotic User Interface,以下RUI)とは、ロボットを使ったインタフェースです。 ロボットを使うので「動き」や「力」を出力することが出来ます。 これによって、遠く離れた場所にあるもう一体のロボットと操作したり、 コンピュータ内のアバタを操作することが出来ます。 将来はテレビゲームのコントローラ等への利用を考えています。◦ハンドパペット型RUI◦ハンドパペット型ロボッティックユーザインタフェースは手袋形状のロボットです。 ユーザこのインタフェースを手に装着し、コンピュータの中で生成されたCGアバタを操作することができます。保持型RUI◦保持型RUIが縫いぐるみの中に入っています。 力覚ディスプレイとしての開発を進めています。
PublicationJournal•小泉 直也 , 清水 紀芳 , 杉本 麻樹 , 新居 英明 , 稲見 昌彦, ハンドパペット型ロボティックユーザインタフェースの開発, 日本バーチャルリアリティ学会論文誌 11(2), 265-274, 2006-06-30•清水 紀芳 , 小泉 直也 , 杉本 麻樹 , 新居 英明 , 関口 大陸 , 稲見 昌彦, 保持型ロボティックユーザインタフェースの研究, 知能と情報 : 日本知能情報ファジィ学会誌 : journal of Japan Society for Fuzzy Theory and Intelligent Informatics 17(2), 212-221, 2005-04-15Oral Presentation•清水紀芳, 小泉直也, 杉本麻樹, 新居英明, 稲見昌彦, 保持型ロボティックユーザインタフェースの研究, エンタテインメントコンピューティング2004論文集, pp.55-58, 2004•小泉直也, 清水紀芳, 杉本麻樹, 新居英明, 稲見昌彦, ハンドパペット型ロボティックユーザインタフェースの研究, エンタテインメントコンピューティング2004論文集, pp.59-63, 2004•山本 暁夫 , 清水 紀芳 , 小泉 直也 , 杉本 麻樹 , 新居 英明 , 長谷川 晶一 , 稲見 昌彦, 保持型ロボティックユーザインタフェースによる情報提示法の研究, 電子情報通信学会技術研究報告. MVE, マルチメディア・仮想環境基礎 105(106), 61-64, 2005-05-27 -
ARMS-II
- 1993
- interaction
- touch
- VR
- daily life
東京工業大学 ロボット技術研究会 ARMS (Artificial Reality Management Systems) Project ARMS-II at the first Inter-collegiate Virtual Reality Contest (IVRC) in 1993. A DC-motor-based haptic display and an electrical-muscle-stimulation-based haptic display for the grasping sensation were achieved. This work was chosen as a winner and the Technical Award of IVRC 1993.
-
BYU BYU View
- 2008
- interaction
- multi/cross modal
- tangible
- communication
BYU-BYU-View is a novel interface realized with the symbiosis of the input/output of wind and the computer graphics. "BYU-BYU" is a japanese onomatopoeia for a howling wind. It adds a new element, that is, "wind", to the direct interaction with a user and a virtual environment, and the communication through a network, by integrating the graphic presentation with the input and output of wind on a special screen.
遠隔地にいる相手とスクリーンを通して風によるテレコミュニケーションを実現した作品。手元にあるロウソクの火がスクリーンに映る人物に吹き消されるなど、遠くにいる相手の息遣いまで送受信できる。
澤田枝里香, 淡路達人, 森下圭介, 古川正紘, 有賀友恒, 木村秀俊, 藤井智子, 武市隆太, 清水紀芳, 井田信也, 常盤拓司, 杉本麻樹, 稲見昌彦, 風を利用した入出力インタフェース:ビュー・ビュー・View, 日本バーチャルリアリティ学会論文誌 第13 巻第1 号, pp.375-383, 2008 -
Chewing Jockey
- 2011
- interaction
- taste
- AR/MR/DR
- foods
"Chewing Jockey" augments food texture by introducing sound, based on the cross-modality effect. Users can experience munching “super” crispy potato chip, biting “live” food or eating “artificial” materials. We aim to improve eating experience to encourage healthy habits, and to make the eating process entertaining.
Origin of the name apanese Chef changes the food taste depends on the person who eat with checking his/her. This interaction between chef and custom is similar as the DJ/VJ change the media with floor condition. I would like to adapt this structure to control the feeling of food texture. So I named this as "chewing Jockey".
概要 料理の定義を、「食材の加工」ではなく、「感覚の操作」として考えたときに、コンピュータによる「食感覚のハッキング」は何ができるだろうか?またそれによってどのような「料理法」が成立するのか?を考えています。本研究では、食感を咀嚼音の重畳によって書き換えることで、今までにない新しい「料理法」を提案し、"Computational Cooking"の手法の可能性を探っています。
名前の由来 板前さんが、食材を選びながらお客さんに合わせて料理をするという構造が、DJ/VJがフロアの反応を確認しながらプレイする様子と同じだと思いました。その構造で人間の咀嚼時の食感をコントロール出来るようにしたいと思い、チューイングジョッキー( Chewing Jockey )という名前にしました。
Media / メディアでの紹介 web article / ウェブ記事
NewScientist
"Smart headset gives food a voice", 2 December 2011
REUTERS VIDEO GALLERY
"Chewing jockey puts crunch in your lunch", 21 Dec 2011
TV / テレビ
NHK『五感の迷宮』
2011年10月29日(土) 午後9:00~午後10:15 放映
Publication 田中秀和 ,小泉直也 ,上間裕二 ,南澤孝太 ,稲見昌彦, 咀嚼検出デバイスを用いた食感拡張システムの提案 , 第16回バーチャルリアリティ学会論文集, pp694-697(はこだて未来大学,2011年9月22日)
VRSJ16th
Augmented_food_texture_rendering_system_using_chewing_detection_device.pdf
Naoya Koizumi, Hidekazu Tanaka, Yuji Uema, Masahiko Inami , Chewing Jockey: Augmented Food Texture by using sound based on the cross-modal effect , ACM 8th international conference on Advanced on Entertainment technology ( Reitoria da Universidade Nova de Lisboa / ノーヴァ・デ・リスボン大学 リスボン ポルトガル ,2011年11月10日)
ACE2011(Advance in Computer Entertainment technology)
a21-koizumi.pdf
Hidekazu TANAKA, Naoya KOIZUMI, Yuji UEMA, Masahiko INAMI, Chewing Jockey : Augmented Food Texture by using sound based on the cross-modal effect, ACM Siggraph 2011
SiggraphAsia2011
18-0039.pdf -
CRISTAL
- 2009
- interaction
- sight
- AR/MR/DR
- daily life
The amount of digital appliances and media found in domestic environments has risen drastically over the last decade, for example, digital TVs, DVD and Blu-ray players, digital picture frames, digital gaming systems, electronically moveable window blinds, and robotic vacuum cleaners. As these devices become more compatible to Internet and wireless networking (e.g. Internet-ready TVs, streaming digital picture frames, and WiFi gaming systems, such as Nintendo's Wii and Sony's Playstation) and as networking and WiFi home infrastructures become more prevalent, new opportunities arise for developing centralized control of these myriad devices and media into so called "Universal remote controls". However, many remote controls lack intuitive interfaces for mapping control functions to the device intended being controlled. This often results in trial and error button pressing, or experimentation with graphical user interface (GUI) controls, before a user achieves their intended action.
CRISTAL:Control of Remotely Interfaced Systems using Touch-based Actions in Living spaces
概要 CRISTAL(Control of Remotely Interfaced Systems using Touch-based Actions in Living spaces)とはテーブル内に埋め込まれたディスプレイとタッチ入力インタフェース(テーブルトップインタフェース)を用いた家電操作インタフェースである.
本インタフェースではシステム内に保存されたDVDや写真などのコンテンツをテレビやデジタルフォトフレームなどにテーブルトップインタフェース上でドラッグアンドドロップ(Drag and Drop)することでコンテンツの再生などができる直感的な操作をユーザに提供する.テーブルトップインタフェース上では保存されたコンテンツのプレビューを行うことができたり,DVDの再生,早送り,巻き戻しを直感的に行うことができる.さらに,部屋の中に設置された照明やスピーカなどをテーブルトップインタフェース上で直接触ることで操作をすることができる.また,実世界のコントロールを行うことができ,本インタフェースでは家庭用ロボットへの掃除の指示を行うことができる.
CRISTALプロジェクトはUpper Austria University of Applied Science, Media Interaction研究室を主導とした研究プロジェクトであり,我々の研究グループは実世界コントロールの部分を担当している.具体的にはSketch and RunインタフェースをCRISTALへ応用し,システムから家庭用掃除ロボットのコントロールを可能にした.
発表文献 Thomas Seifried, Michael Haller, Stacey Scott, Florian Perteneder, Christian Rendl, Daisuke Sakamoto, and Masahiko Inami, CRISTAL: Design and Implementation of a Remote Control System Based on a Multi-touch Display, The ACM International Conference on Interactive Tabletops and Surfaces 2009 (ITS2009, Tabletop2009), pp. 37-44, November 2009, Banff, Canada.
Thomas Seifried, Christian Rendl, Florian Perteneder, Jakob Leitner, Michael Haller, Daisuke Sakamoto, Jun Kato, Masahiko Inami, and Stacey D. Scott, CRISTAL: Control of Remotely Interfaced Systems using Touch-based Actions in Living spaces.
In ACM SIGGRAPH 2009 Emerging Technologies (New Orleans, Louisiana, August 03 - 07, 2009). SIGGRAPH '09. ACM, New York, NY, 1-1. DOI= http://doi.acm.org/10.1145/1597956.1597962. PDF
SIGGRAPH 2009 から "Best of Emerging Technologies Award" を、
Laval Virtual 2010 から "Grand Prix du Jury" を受賞.
展示会 CEATEC JAPAN 2009(最先端IT・エレクトロニクス総合展、幕張メッセ、2009/10/6 - 10)における、経済産業省の「コンテンツ国際取引市場強化事業(ソフトとハードの連携による新しいコンテンツ創出促進事業)」の特別企画展示「ライフコンテンツ フロンティア」に出展しました。 -
Fur Display
- 2000
- interaction
- multi/cross modal
- tangible
- entertainment
Fur Display makes invisible information visible. It not only delivers dynamic movements of appealing, bushy fur, but it is also a feathery, visual, tactile display that invites touch and interaction. Earlier versions of this concept often used rigid surfaces like tabletops, but Fur Display presents touchable fur with surprising dynamic movement. The device is simple and small, so it can be placed on clothing, appliances, or personal belongings, where it becomes a useful, friendly interface in our daily lives.
本稿では,人がより直感的に理解できる情報伝達が可能でかつ親しみを抱きやすい新たなインターフェースとして FurDisplay の提案を行う.また,試作を行い FurDisplay の有用性とインタラクショ
ン性を検討するためにユーザによる評価実験を行ったので結果を報告する.
FurDisplay の重要な特徴は誰もが素直に理解できる情報伝達が可能であるということである.本稿では猫が威嚇する際などに毛を逆立てるといった立毛現象を利用して情報提示を行う.立毛現象を工学的に再現
するためのアクチュエータとして円盤型振動モータのみを用いるため,従来の同様の研究と比較してシンプルな機構を達成している.また FurDisplay の素材として天然毛皮を用いることで人に親しみやすさを与える効果を得ている.さらに天然毛皮を用いることで従来研究で課題であった毛並みの再現という点が問題にならない.FurDisplay は機構がシンプルで親しみやいため日常生活の身の周り物に適用が可能でありそれらに新たな価値を付加することができる.FurDisplay の有用性と人とのインタラクション性を検討するために試作を行い評価を行った.試作品として天然毛皮に円盤形振動モータを取り付けた基本的な FurDisplay を作製した.また,応用事例として我々が普段よく利用する家電製品やアクセサリーに FurDisplay を実装した. -
Motion Sphere
- 2005
- sensing
- sight
- Telexistence
- sports
This image-processing technology stabilizes the trembling in images captured with a rotating camera in real time, and because of its "sphere" characteristics, it can track objects no matter how fast or where they are moving.
-
Robot Phone
- 2000
- robotics
- multi/cross modal
- Telexistence
- communication
RobotPHONE is a Robotic User Interface (RUI) that uses robots as physical avatars for interpersonal communication.Using RobotPHONE, users in remote locations can communicate shapes and motion with each other. In this paper we present the concept of RobotPHONE, and describe implementations of two prototypes.
RobotPHONEとは?
RobotPHONE(ロボットフォン)とは,ロボットを用いた新しい形の電話です.
通常の電話は離れたところに声を伝えるだけです.しかしRobotPHONEを用いることで 声だけでなく,ロボットを介して身振りや手振りを伝えることができるように なります.また,ロボットを通して力を伝え合うことで離れた人と握手を行うことも可能です.
概要 長年にわたりロボットは工場や,人の行けない危険な場所で「作業」を行うことを 目的として研究が進められてきました.それに対して近年「人に働きかける」ことを 目的としたロボットが登場しています.中でもロボットを人へのインタフェイスとして とらえた考え方がRobotic User Interface (RUI)です.
例えば現在コンピュータと言えば マウスにキーボード,そしてディスプレイを思い浮かべます.しかし,未来のコンピュータの 「顔」としてロボットは大変重要な働きがあると期待されております. このRobotPHONEもコミュニケーションのためのRUIの一種と位置づけられます.
RobotPHONEは離れた複数のロボットの動きを同期させることで機能します. 全身に備えられた関節角センサの情報を 元に,ワンチップコンピュータでモーターを制御することでロボットの動きを 同期させています.
RobotPHONEは,将来は電話やインターネットに簡単に接続する事が可能となります. このことで,職場にいながら自宅の子供をあやしたり,外国の子供と遊んだりと いったことがすぐにでも実現できるようになります.
なお,二台のRobotPHONEの間は音声とロボットの形状データのみのやりとりとなっているため, 通常の電話回線や低速のインターネット回線で十分動作可能です.小型化することで,ロボット携帯電話も夢ではありません.
参考文献 関口, 稲見, 舘, オブジェクト指向型テレイグジスタンスによるロボティックユーザインタフェース -形状共有システムの提案と試験的実装-, インタラクティブシステムとソフトウェア VIII: 日本ソフトウェア科学会 WISS 2000, 近代科学社, pp.51-56, 2000
D. Sekiguchi, M.Inami, S. Tachi: RobotPHONE: RUI for Interpersonal Communication, CHI2001 Extended Abstracts, pp. 277-278, 2001. [PDF file (328KB)]
D. Sekiguchi, M. Inami, N. Kawakami, T. Maeda, Y. Yanagida, and S. Tachi, RobotPHONE: RUI for Interpersonal Communication, ACM SIGGRAPH 2000 Conference Abstracts and Applications, p.134, 2000
関口, 川上, 柳田, 稲見, 舘, RCML:アールキューブ操作言語の開発 第10報-多様なクライアント環境への対応-, 日本ロボット学会学術講演会, CD-ROM, 2001
稲見, 関口, 川上, 舘, RobotPHONEによる物体共有型コミュニケーション, 第95回ヒューマンインタフェース研究会論文集, 2001 -
Silent Humming
- 2011
- display
- hearing
- Augmented Human
- entertainment
it is so much fun to hum. But to the people around you, it's just a nuisance. In this research, we propose "Silent Humming", a device that allows users to hum without people around them hearing it, much like Silent Piano and Silent Violin.
This device uses a microphone and a throat position sensor that are placed on the user's neck. These detect the unvoiced sounds by the user that other people cannot hear, and the position of their Adam's apple. Therefore, this device can produce the humming sounds and pitches without the need of the user vocalizing.
発表文献 Kentaro Yasu, Masahiko Inami,“ Silent Humming : A digital humming producing system using unvoiced sounds and throat motion”, Laval Virtual 2012, 2012.4 (France, March 28- April 2, 2012) (poster) ◯安 謙太郎, 竹内 祐太, 稲見 昌彦(慶應義塾大学), サイレントハミング:呼気音と咽頭運動を利用した鼻歌再現システム, エンタテインメントコンピューティング2011,セッション4B 声, 04B-06, 2011[pdf] 安 謙太郎,竹内 祐太,稲見 昌彦, サイレントハミング:呼気音と咽頭運動を利用した鼻歌再現システム, WISS2011,2011年12月[poster]
概要鼻歌を歌うことは気持ちがいいですが、しかし周りの人にしてみればその音が迷惑になることもあります。本研究ではサイレントピアノ、サイレントバイオリン等に倣い、周りに聞こえない鼻歌を実現するデバイス「サイレントハミ ング」を提案します。本デバイスを喉に装着すれば、全く発声することなく電子的な鼻歌を歌うことができます。デバイス内に設けた呼気音マイク、および喉頭位置センサにより、周りの人には聞こえないレベルの微小無声音および喉頭位置をセンシングすることで、全く発声することなく鼻歌の音量、音程を再現します。
発表文献 Kentaro Yasu, Masahiko Inami,“ Silent Humming : A digital humming producing system using unvoiced sounds and throat motion”, Laval Virtual 2012, 2012.4 (France, March 28- April 2, 2012) (poster)
◯安 謙太郎, 竹内 祐太, 稲見 昌彦(慶應義塾大学), サイレントハミング:呼気音と咽頭運動を利用した鼻歌再現システム, エンタテインメントコンピューティング2011,セッション4B 声, 04B-06, 2011[pdf]
安 謙太郎,竹内 祐太,稲見 昌彦, サイレントハミング:呼気音と咽頭運動を利用した鼻歌再現システム, WISS2011,2011年12月[poster] -
Stickable Bear
- 2007
- robotics
- multi/cross modal
- tangible
- entertainment
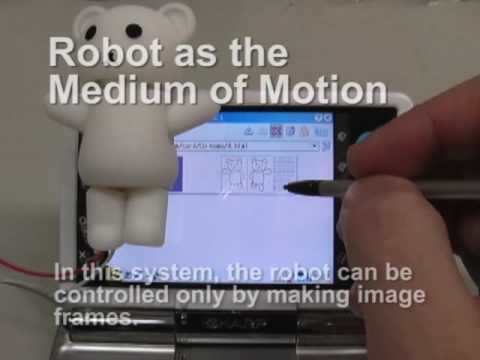
A Motion Sharing Robot with Display Based Computing
-
Walky
- 2011
- robotics
- embodiment
- Telexistence
- entertainment
Walky: Operating Method for a Bipedal Walking Robot through Personalized Gestures Expression of Fingers Yuta Sugiura, Gota Kakehi, Anusha Withana, Charith Fernando, Daisuke Sakamoto, Masahiko Inami, and Takeo Igarashi
Abstract We propose a novel operating method for a bipedal walking robot through personalized gesture expressions of fingers. Bipedal walking robot mimics the human walking for certain extend and fingers can be used as analogy to human legs. Moreover, fingers not only have visual resemblance but also can mimic actions of legs such as walking, running, kicking or turning, very easily. We are capturing these finger gestures as the controlling method for a bipedal walking robot. We believe that it provides a very intuitive controlling interface since user does not have to go through a complex learning cycle to understand the instructions. Finger actions are captured in both functionality and speed and transferred to the robot.
Walky: 指の擬人的な動作を用いた歩行ロボットへの操作手法
杉浦 裕太、筧 豪太、アヌーシャ ウィタナ、坂本 大介、稲見 昌彦、五十嵐 健夫
概要 人差し指と中指を下方向に伸ばし,その指を交互に動作させたとき,人間の歩行動作と類似していることがわかる.これは指の形状,バイオロジカルな動作が人間の脚と歩行動作と似ている際に生じる擬人化が理由だと考えられる.本研究では,この指に対する擬人化的な動作を用いて,歩行ロボットの操作入力手法を提案する.ユーザはマルチタッチディスプレイ上で,指で歩行動作のような入力を行うことにより,その動作と同期して歩行ロボットへの歩行指示が可能なインタフェースを開発する.本インタフェースにより,ユーザは複雑な操作学習過程を経ることなく,歩行ロボットの脚部動作に細かい指示を与えることが可能となる.
発表文献 杉浦 裕太,坂本 大介,稲見 昌彦,五十嵐 健夫,
「指の擬人的な動作を利用した歩行ロボットへの操作手法」、
ロボティクス・メカトロニクス講演会2012 (ROBOMEC 2012)、ポスター、2012年5月27-29日、浜松。
杉浦 裕太,筧 豪太,アヌーシャウィタナ,坂本 大介,稲見 昌彦,五十嵐 健夫,
「指の擬人的な動作を用いた二足歩行ロボットへの動作指示手法」、
情報処理学会論文誌,特集論文 インタラクションの基盤技術、デザインおよび応用(テクニカルノート),
Vol.52,No.2,pp.737-742,2011年2月.
杉浦 裕太,筧 豪太,Anusha Indrajith Withana,坂本 大介,Charith Lasantha Fernando,稲見 昌彦,五十嵐 健夫,
「Walky: 指の擬人的な動作を利用した歩行ロボットへの操作手法」,
インタラクション2010 インタラクティブ発表(プレミアム)、pp. 87-88、2010年3月。 PDF ベストインタラクティブ賞受賞
Yuta Sugiura, Charith L. Fernando, Anusha I. Withana, Gota Kakehi, Daisuke Sakamoto, Maki Sugimoto, Masahiko Inami, Takeo Igarashi and Masa Inakage,
"An Operating Method for a Bipedal Walking Robot for Entertainment",
ACM SIGGRAPH Asia 2009 Emerging Technologies, pp. 79-79, Yokohama, December 2009.
展示 インタラクティブ東京2010 (i-Tokyo2010) に招待展示、日本科学未来館、2010年8月24-25日
メディア 「ロボット専門店 外国人観光客殺到」,東京中日スポーツ,2010年1月9日.
SIGGRAPH ASIA 2009 レポート,ROBOCON Magazine,2010年2月.
SIGGRAPH ASIA 2009 で最新インタラクティブ技術を体感,moonlinx,2009年12月24日.
「SIGGRAPH Asia 2009」開幕、ロボット関連展示レポート,Robot Watch,2009年12月18日.
Walky robot understands iPhone gestures, football fanaticism (video), engadget, Nov 17, 2009.
iPhone controlled bipedal walking robot with multi-touch gestures, Make, Nov 13, 2009.
Control Your Robot with iPhone Finger Gestures using “Walky”, PLASTIC PALS.
Walky: Using natural finger gestures to control humanoid robots (Video), robots dreams.
影木准子の海外ロボットニュースダイジェスト, Robot Watch. -
haramaky
- 2012
- sensing
- embodiment
- foods
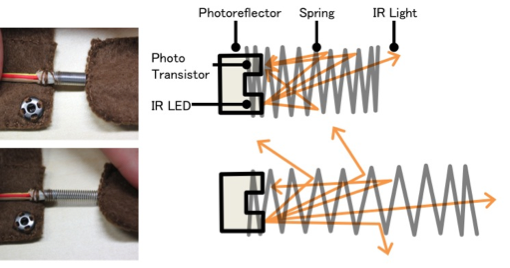
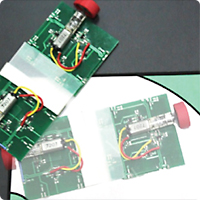
Abstract We proposed a fabrication method for stretchable sensor. The stretchable sensor consist of a photo reflector (made up of a photo transistor and an infrared LED) and a spring. The photoreflector is embedded in the spring. When the spring is not stretched, the emitted IR light will reflect back to the phototransistor. However, when the spring is stretched, some of the emitted IR light can flow out through the aperture of the spring, reducing the light reflecting back to the transistor. Therefore, the more the spring is stretched, the less the amount of light would be detected. This method allows user to construct a stretchable sensor that is simple, low-cost and customizable.
HARAMAKY:バネとフォトリフレクタで構成する伸縮センサ (2012.6-2015.3,) -
Multi touch handle
- 2014
- sensing
- touch
- tangible
- transportation
multitouchhandle:Multi-touch Steering Wheel for In-car Tertiary Applications using Infrared Sensors
This system can recognize hand gestures at any position on the steering wheel by utilizing 120 infrared (IR) sensors embedded in it. The sensors are lined up in an array surrounding the whole wheel. An Support Vector Machine (SVM) algorithm is used to learn and recognize the different gestures through the data obtained from the sensors. The gestures recognized are flick, click, tap, stroke and twist. Additionally, we implemented a navigation application and an audio application that utilizes the torus shape of the steering wheel.
マルチタッチハンドルインタフェース (2013.1-2014.3,AH 2014) -
PHOENIX-LETTERS
- 2010
- display
- sight
- daily life
Shreya Deshmukh, Masaki Aijima, Hirokazu Kawana, Yuta Sugiura, Naoya KOIZUMI, and Masahiko Inami, PHOENIX-LETTERS: Designing Special Messages with Burning Patterns in a Microwave Oven.
発表文献 Next Generation賞 / 芸術科学会,エンタテインメントコンピューティング2010
Shreya Deshmukh, Masaki Aijima, Hirokazu Kawana, Yuta Sugiura, Naoya KOIZUMI, and Masahiko Inami, PHOENIX-LETTERS: Designing Special Messages with Burning Patterns in a Microwave Oven, エンタテインメントコンピューティング2010 (2010年 10月22日〜24日, 京都工芸繊維大学) -
Pressure Detection
- 2014
- sensing
- touch
- tangible
- entertainment
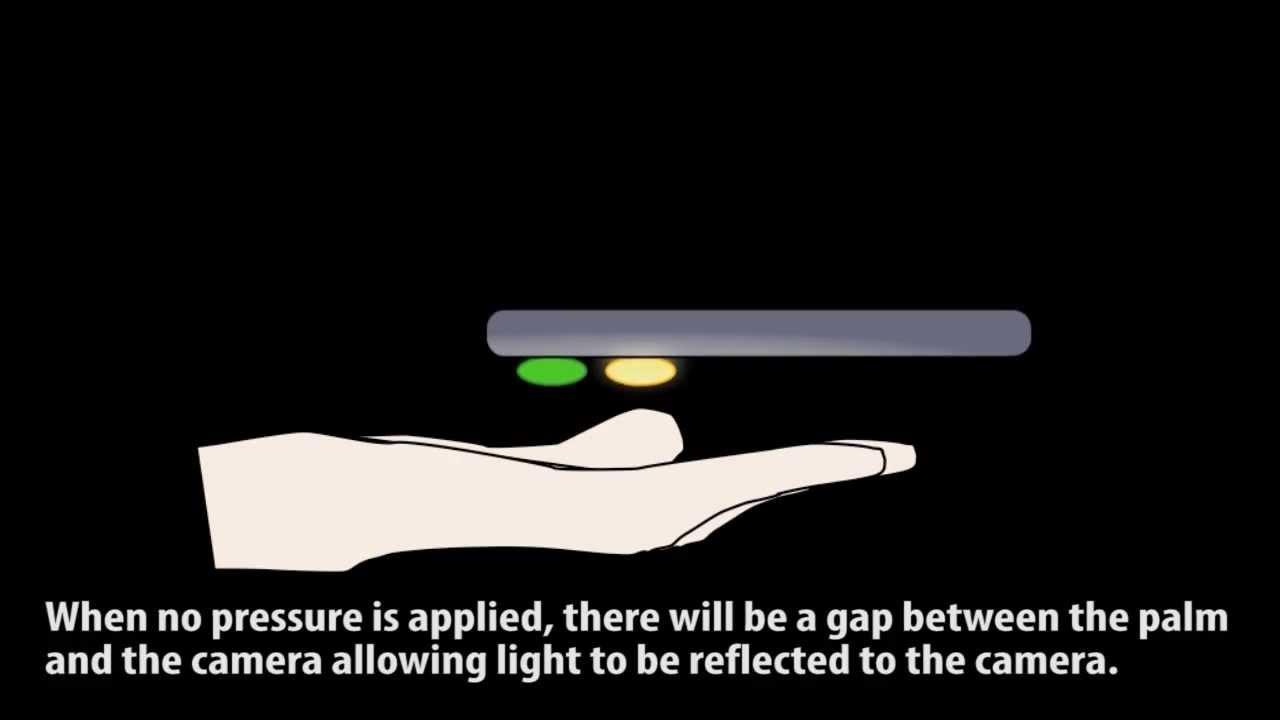
This paper proposes a method to detect pressure asserted on a mobile phone by utilizing the back camera and flash on the phone. There is a gap between the palm and camera when the phone is placed on the palm. This allows the light from the flashlight to be reflected to the camera. However, when pressure is applied on the phone, the gap will reduce, reducing the brightness captured by the camera. This phenomenon is applied to detect two gestures: pressure applied on the screen and pressure applied when user squeezes the phone. We also conducted an experiment to detect the change in brightness level depending on the amount of force asserted on the phone when it is placed in two positions: parallel to the palm and perpendicular to the palm. The results show that when the force increases, the brightness level decreases. Using the phones ability to detect fluctuations in brightness, various pressure interaction applications such as for gaming purposes may be developed.
Publications: Suzanne Low, Yuta Sugiura, Dixon Lo, and Masahiko Inami. 2014. Pressure detection on mobile phone by camera and flash. In Proceedings of the 5th Augmented Human International Conference (AH '14). ACM, New York, NY, USA, , Article 11 , 4 pages. DOI=10.1145/2582051.2582062 http://doi.acm.org/10.1145/2582051.25...
スマートフォンのカメラとフラッシュを使った圧力の計測手法 (2013.12-2014.3,AH 2014) -
Puppet
- 2012
- robotics
- embodiment
- tangible
- entertainment
An Actuated Physical Puppet as an Input Device for Controlling a DigitalManikin Wataru Yoshizaki, Yuta Sugiura, Albert C. Chiou, Sunao Hashimoto,Masahiko Inami, Takeo Igarashi, Yoshiaki Akazawa, Katsuaki Kawauchi,Satoshi Kagami, Masaaki Mochimaru
Abstract We present an actuated handheld puppet system for controlling the posture of a virtual character. Physical puppet devices have been used in the past to intuitively control character posture. In our research, an actuator is added to each joint of such an input device to provide physical feedback to the user. This enhancement offers many benefits. First, the user can upload pre-defined postures to the device to save time. Second, the system is capable of dynamically adjusting joint stiffness to counteract gravity, while allowing control to be maintained with relatively little force. Third, the system supports natural human body behaviors, such as whole-body reaching and joint coupling. This paper describes the user interface and implementation of the proposed technique and reports the results of expert evaluation. We also conducted two user studies to evaluate the effectiveness of our method.
Publication Wataru Yoshizaki, Yuta Sugiura, Albert C. Chiou, Sunao Hashimoto,Masahiko Inami, Takeo Igarashi, Yoshiaki Akazawa, Katsuaki Kawauchi,Satoshi Kagami, Masaaki Mochimaru, An Actuated Physical Puppet as an Input Device for Controlling a DigitalManikin, the ACM CHI Conference on Human Factors in Computing Systems (CHI2011), May 7-12, 2011, Vancouver BC, (to appear).
アクチュエータを備えた人形型入力デバイス
Wataru Yoshizaki, Yuta Sugiura, Albert C. Chiou, Sunao Hashimoto, Masahiko Inami, Takeo Igarashi, Yoshiaki Akazawa, Katsuaki Kawauchi, Satoshi Kagami, Masaaki Mochimaru
概要デジタルヒューマンの姿勢を入力するためのアクチュエータを備えた人形型デバイスを提案する。 人形型入力デバイスはこれまでもCGキャラクターの姿勢入力に使われていたが、我々はこれに アクチュエータを加えることを提案する。アクチュエータを加えることで、以下のような利点がある。
1)設定済みの姿勢をデバイスに取り込んで反映することができる。
2)能動的な重力補償を行うことにより、重力に抗して姿勢を維持しつつ、かつ軽い力で動かすことができる。
3)関節間の連動など、人体のもつ性質を反映することができる。
ユーザテストにより本手法の有効性を確認している。
発表文献 吉崎航、杉浦裕太、C. Chiou Albert、橋本直、稲見昌彦、五十嵐健夫、赤澤由章、川地克明、加賀美聡、持丸正明、
「キャラクタ姿勢入力のための双方向インタフェース」、
ロボティクス・メカトロニクス講演会2012 (ROBOMEC 2012)、2P1-Q05、5月27-29日、浜松。
Wataru Yoshizaki, Yuta Sugiura, Albert C. Chiou, Sunao Hashimoto,Masahiko Inami, Takeo Igarashi, Yoshiaki Akazawa, Katsuaki Kawauchi,Satoshi Kagami, Masaaki Mochimaru,
An Actuated Physical Puppet as an Input Device for Controlling a DigitalManikin,
the ACM CHI Conference on Human Factors in Computing Systems (CHI2011), May 7-12, 2011, Vancouver BC. -
Reality Jockey
- 2013
- interaction
- multi/cross modal
- AR/MR/DR
- entertainment
Reality jockey: lifting the barrier between alternate realities through audio and haptic feedback
Abstract We present Reality Jockey, a system that confuses the participant's perception of the reality by mixing in a recorded past-reality. The participant will be immersed in a spatialized 3D sound environment that is a mix of sounds from the reality and from the past. The sound environment from the past is augmented with haptic feedback in cross-modality. The haptic feedback is associated with certain sounds such as the vibration in the table when stuff is placed on the table to make the illusion of it happening in live. The seamless transition between live and past creates immersive experience of past events. The blending of live and past allows interactivity. To validate our system, we conducted user studies on 1) does blending live sensations improve such experiences, and 2) how beneficial is it to provide haptic feedbacks in recorded pasts. Potential applications are suggested to illustrate the significance of Reality Jockey.
Publication Kevin Fan, Hideyuki Izumi, Yuta Sugiura, Kouta Minamizawa, Sohei Wakisaka, Masahiko Inami, Naotaka Fujii, and Susumu Tachi. 2013. Reality jockey: lifting the barrier between alternate realities through audio and haptic feedback. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems (CHI '13). ACM, New York, NY, USA, 2557-2566. DOI=10.1145/2470654.2481353 [PDF][Slides][Talk] -
ImpAct
- 2011
- interaction
- touch
- tangible
- daily life
ImpAct is a stylus which can dynamically change its effective length and it is equipped with sensors to calculate its orientation in world coordinates. When a user pushes it against a touch screen, physical stylus shrinks and a rendered projection of the stylus is drawn inside the screen giving the llusion that it submerged into the display device. Once user can see the stylus immersed into the digital world below the screen, he/she can manipulate and interact with the virtual objects with active haptic ensations.
Project was developed under masters degree program in Keio Media Design, Keio University, Japan.
ImpAct was demonstrated at ACM UIST 2010, NY and to be published in ACM Computers in Entertainment and ACE 2010, Taipei in November 2010. -
JINS MEME
- 2014
- sensing
- sight
- Augmented Human
- daily life
JINS MEME offers insights into your mood and current level of fatigue.
The world’s first eyewear that lets you see yourself.
JINS MEMEを通して、今の疲れが見える。気分が見える。
それは世界初、内なる自分を知ることができるウェアラブルメガネ。 -
Foldy
- 2009
- robotics
- prototyping
- daily life
Foldy: Graphical Instruction for Garment-Folding Robot Yuta Sugiura, Takeo Igarashi, Hiroki Takahashi, Tabare A. Gowon, Charith L. Fernando, Maki Sugimoto, and Masahiko Inami
Abstract We present an interactive graphical editing interface for giving instructions to a garment-folding robot. The interface allows a user to teach a robot to fold a garment by performing simple editing operations (clicking and dragging). The interface consists of a simple garment folding simulation mechanism for detecting actions that would be impossible for the robot to perform, and it returns visual feedback to the user. The robot performs an actual garment-folding task by completing the instructions set by the user. We conducted a user study to evaluate our interface by comparing it with two other methods: controlling the robot using a game-pad, and folding a real garment by hand (teaching by demonstration). The results show that our interface provides natural and intuitive instruction comparable to folding by hand.
Publication Yuta Sugiura, Takeo Igarashi, Hiroki Takahashi, Tabare A. Gowon, Charith L. Fernando, Maki Sugimoto, and Masahiko Inami, Foldy: Graphical Instruction for A Garment Folding Robot, ACM SIGGRAPH 2009 Full-Conference DVD-ROM Emerging Technologies, New Orleans, August 2009. ACM DOI Bookmark: http://doi.acm.org/10.1145/1597956.1597968
Exhibition Exhibits with Content Technology Exhits (ConTEX 2009) at DIGITAL CONTENT EXPO 2009 (Oct. 22-25, 2009, National Museum of Emerging Science and Innovation: Miraikan, Tokyo, Japan).
Link http://robonable.typepad.jp/news/2009/09/20090904-e83b.html http://gizmodo.com/5354911/foldy-the-laundry-folding-robot-is-qualified-to-work-at-the-gap http://www.nbclosangeles.com/news/tech/A-Drama-Unfolds-New-Robot-Folds-Your-Laundry-57817062.html
Foldy: 服たたみロボットへの柔軟な指示手法
杉浦 裕太、五十嵐 健夫、高橋 大樹、Tabare A. Gowon, Charith L. Fernando、杉本 麻樹、稲見 昌彦
概要 本研究では、嗜好に合わせて服の畳み方を入力できるGUIと、それを再現するロボットを含めたシステムFoldy(フォールディー)を開発した。ユーザはマウス操作で画面上の服のモデルを操作し、畳み方を入力する。GUIにはロボットが実世界で作業する上での制約が考慮されており、操作に合わせてフィードバックを返す。本システムでは、ロボットの動作を直接教示するのではなく、好みを反映させたい部分だけを操作すれば良いので、効率的かつ感覚的に教示することができる。
発表文献 Yuta Sugiura, Takeo Igarashi, Hiroki Takahashi, Tabare A. Gowon, Charith Lasantha Fernando, Maki Sugimoto and Masahiko Inami, "Graphical Instruction for A Garment Folding Robot", ACM SIGGRAPH 2009 Full-Conference DVD-ROM Emerging Technologies, New Orleans, August 2009. ACM DOI Bookmark: http://doi.acm.org/10.1145/1597956.1597968
国内発表杉浦裕太、坂本大介、Tabare Gowon、高橋大樹、稲見昌彦、五十嵐健夫、
Foldy: GUI操作によるロボットへの服の畳み方の教示、WISS 2010、2010年12月。 PDF
杉浦裕太,坂本大介,高橋大樹,Tabare Gowon,Charith Fernando,杉本 麻樹,稲見昌彦,五十嵐健夫,
Foldy: 服たたみロボットへの柔軟な指示手法,インタラクティブ東京2009,2009年10月.
杉浦裕太,五十嵐健夫,高橋大樹,Tabare Gowon,Charith Fernando,杉本 麻樹,稲見昌彦,
Graphical Instruction for a Garment Folding Robot,エンタテインメントコンピューティング2009,2009年9月.
デモ展示デジタルコンテンツ・エキスポの「次世代コンテンツ技術展」、ConTex 2009、10月22-25日、日本科学未来館。
リンクロボナブル・ニュースl
GIZMODO
NBC Los Angeles news
メディア 2009.10.18 テレビ東京「ワールドビジネスサテライト」の「トレンドたまご」で放映。 -
RoboJockey
- 2010
- robotics
- embodiment
- prototyping
- entertainment
RoboJockey: real-time, simultaneous, and continuous creation of robot actions for everyone. Shigeo Yoshida, Takumi Shirokura, Daisuke Sakamoto, Yuta Sugiura, Tetsuo Ono, Masahiko Inami, and Takeo Igarashi
Abstract We developed the RoboJockey (Robot Jockey) interface for coordinating robot actions, such as dancing, similar to a "disc jockey" or "video jockey" who selects and plays recorded music or video for an audience, in this case, robot’s actions, and giving people a new entertainment experience with robots. The system enables a user to choreograph a robot to dance using a simple visual language. RoboJockey consists of a multi-touch tabletop interface for multi-user collaboration. Every icon on the interface is circular and can be operated from all positions around the tabletop interface. RoboJockey supports two types of robots, a simple mobile robot and a humanoid robot. Users can coordinate the mobile robot’s actions with a combination of back, forward, and rotating movements, and the humanoid robot’s actions with a combination of arm and leg movements. Every action is automatically performed to background music. We demonstrated RoboJockey at a Japanese domestic symposium, and confirmed that people enjoyed using the system and successfully created entertaining robot dances.
概要 本稿ではロボットを扱ったことがないエンドユーザであっても,音楽に同期したロボットのダンス作成を簡単に行うことができるインタフェースの提案を行う.本インタフェースを用いることにより,ロボッ トの動きを作るユーザとそれを鑑賞するユーザという垣根をなくし, 誰もがロボットの動きのデザインに参加できるという 新しいエンタテインメント体験が実現される.ロボットの動作作成には我々が開発したビジュアル言語を用いる.作成された動作(プログラム)はロボット上で即座に反映される.ユーザは継続的に動作作成を行うことができ,また複数のロボットの動作も同時に作成することができる.これらの機能を通して,本インタフェースはユーザに”Robot Jockey”になったような感覚を与えることができると考えている.
”Robot Jockey”とは”Disk Jockey (DJ)”や”Video Jockey (VJ)”のように観客に対してロボットの動作を選び,組み合わせ,楽しませる人のことを指す.
発表文献 Yumiko Nagai, Takeshi Sunaga, Daisuke Sakamoto, Masahiko Inami,
"Activity Based Design for Real-Life Technology",
International Congress of the International Association of Societies of Design Research 2013 (IASDR Congress 2013), 1910-1, Aug. 26 - 29, Tokyo.
Shigeo Yoshida, Daisuke Sakamoto, Yuta Sugiura, Masahiko Inami, Takeo Igarashi,
"RoboJockey: Robotic Dance Entertainment for All",
The 5th SIGGRAPH Conference and Exhibition on Computer Graphics and Interactive Techniques in Asia (Siggraph Asia 2012), Emerging Technologies, Singapore, Nov. 28 - Dec. 1.
Takumi Shirokura, Daisuke Sakamoto, Yuta Sugiura, Tetsuo Ono, Masahiko Inami, and Takeo Igarashi,
"RoboJockey: real-time, simultaneous, and continuous creation of robot actions for everyone",
In Adjunct proceedings of the 23nd annual ACM symposium on User interface software and technology (UIST '10) Demonstration. ACM, New York, NY, USA, 399-400.
DOI=10.1145/1866218.1866239
Takumi Shirokura, Daisuke Sakamoto, Yuta Sugiura, Tetsuo Ono, Masahiko Inami, and Takeo Igarashi,.
"RoboJockey: real-time, simultaneous, and continuous creation of robot actions for everyone",
In proceedings of the 7th International Conference on Advances in Computer Entertainment Technology (ACE '10), ACM, Nov. 17-19, 2010, Taiwan. Best Paper Silver Award.
国内発表 代蔵巧, 坂本大介, 杉浦裕太, 小野哲雄, 稲見昌彦, 五十嵐健夫,
「RoboJockey: 連続的なロボットパフォーマンスのためのインタフェース」、 インタラクション2010 インタラクティブ発表(プレミアム), 2009年3月. PDF -
Cooky
- 2010
- robotics
- multi/cross modal
- prototyping
- foods
Cooking with Robots: Designing a Household System Working in Open Environments Yuta Sugiura, Teruki Shinohara, Anusha Withana, Masayasu Ogata, Daisuke Sakamoto, Masahiko Inami, and Takeo Igarashi
Abstract We propose a cooking system that operates in an open environment. The system cooks a meal by pouring various ingredients into a boiling pot on an induction heating cooker and adjusts the heating strength according to the user’s instructions. We then describe how the system incorporates robotic- and human-specific elements in a shared workspace so as to achieve a cooperative rudimentary cooking capability. First, we use small mobile robots instead of built-in arms to save space, improve flexibility and increase safety. Second, we use detachable visual markers to allow the user to easily configure the real-world environment. Third, we provide a graphical user interface to display detailed cooking instructions to the user. We hope insights obtained in this experiment will be useful for the design of other household systems in the future.
Publications Yuta Sugiura, Teruki Shinohara, Anusha Withana, Masayasu Ogata, Daisuke Sakamoto, Masahiko Inami, and Takeo Igarashi, "Cooky: A Cooperative Cooking Robot System", ACM SIGGRAPH ASIA 2011 Emerging Technologies, Article No.16, Hong Kong, Dec. 2011. Yuta Sugiura, Daisuke Sakamoto, Anusha Indrajith Withana, Masahiko Inami, and Takeo Igarashi, Cooking with Robots: Designing a Household System Working in Open Environments, Proceedings of the 28th international Conference on Human Factors in Computing Systems, CHI2010, pp. 2427-2430, Atlanta, USA, April 10-15, 2010. PDF
Link Cooky robots will make soup for you, won't clean up afterwards, Engadget.
Cooky: 調理順序指示インタフェースと料理ロボット
杉浦 裕太、篠原 照樹、Anusha Withana、尾形 正泰、坂本 大介、稲見 昌彦、五十嵐 健夫
概要 本研究では、家庭内において人とロボットが空間を共有し、協調して調理をするシステムCooky(クッキー)を開発した。Cookyは1)料理を物理的に支援する小型ロボット、2)人とロボットが共有可能な調理器具とキッチン、3)料理順序を入力するGUIから構成されている。ユーザはGUI上のタイムラインにタスクを並べていくことで、調理順序を入力する。このタイムラインでは、人とロボットの作業を分割できるようになっている。食材をキッチンにセットした後、実際の調理作業に移る。ロボットは、タイムラインに沿って食材を鍋に入れたり、かき混ぜ作業を行う。システムは、人の作業タイミングがくると、画面に作業内容を提示する。本稿ではシステムを試作し、正しく動作することを確認したためこれを報告する。
発表文献 Yuta Sugiura, Teruki Shinohara, Anusha Withana, Masayasu Ogata, Daisuke Sakamoto, Masahiko Inami, and Takeo Igarashi, Cooky: A Cooperative Cooking Robot System, ACM SIGGRAPH ASIA 2011 Emerging Technologies, Article No.16, Hong Kong, Dec. 2011.
Yuta Sugiura, Daisuke Sakamoto, Anusha Indrajith Withana, Masahiko Inami and Takeo Igarashi,
Cooking with Robots: Designing a Household System Working in Open Environments, Proceedings of the 28th international Conference on Human Factors in Computing Systems, CHI2010, pp. 2427-2430, Atlanta, USA, April 10-15, 2010. PDF
杉浦裕太,坂本大介,Anusha Indrajith Withana,稲見昌彦,五十嵐健夫
Cooky: 調理順序指示インタフェースと料理ロボットの開発,第17回インタラクティブシステムとソフトウェアに関するワークショップ (WISS2009), 2009年12月.(2009/12/2-4@静岡県熱海市 ホテル大野屋), PDF
メディア
日刊工業新聞社 ロボナブル(robonable)
Cooky robots will make soup for you, won't clean up afterwards, Engadget.
Cooky makes you miso soup, GetRobo.
Gourmet Robots Make Cooking More Complicated, Fun, PLASTICPALS. -
Animated Paper
- 2010
- display
- multi/cross modal
- prototyping
- daily life
Animated Paper is a new wireless prototyping platform that combines paper, shape memory alloy (SMA), retro-reflective material, and copper foil. This platform makes it possible to create a moving paper craft. This platform makes it possible to create moving toys out of ordinary print paper with minimal modification to the physical composition of the paper itself, facilitating simple trial-and-error modifications.We also implemented a laser control system which allows for the precise wireless motion control of the SMA-enhanced paper by tracking retro-reflective markers on the paper using a laser and photo sensor.
Publication: Naoya Koizumi, Kentaro Yasu, Angela Liu, Maki Sugimoto, Masahiko Inami, "Animated paper: A toolkit for building moving toys", Computers in Entertainment (CIE) 8(2):7 (2010) Naoya Koizumi, Kentaro Yasu, Angela Liu, Maki Sugimoto, Masahiko Inami, “Animated Paper: A Moving Prototyping Toys", 7th International Con- ference on Advances in Computer Entertainment Technology, (ACE2010), (Taiwan,November17-19, 2010) Naoya Koizumi, Kentaro Yasu, Angela Liu, Maki Sugimoto, Masahiko Inami, “Animated Paper: A Moving Prototyping Platform”, UIST '10 Adjunct proceedings of the 23nd annual ACM symposium on User interface software and technology (UIST2010), pp.389-390, 2010.10. (New York, October 3-6, 2010) 安 謙太郎,小泉 直也,近藤 誠,朱 景華,Liu Angela,杉本 麻樹,稲見 昌彦, "Animated Paper -エネルギープロジェクタを用いた平面型ロボットの制御手法の提案-", ロボティクス・メカトロニクス講演会講演概要集 2010, "1A1-F03(1)"-"1A1-F03(4)", 2010.6
AnimatedPaperは誰でも動く紙工作を創ることのできるプロトタイピングプラットホームです。紙に形状記憶合金を貼り付け、外部から与える熱を制御することで、紙工作をロボットのように操ることを可能にします。
熱源としてヒーターや太陽光だけでなく、高出力レーザを用いれば局所制御が可能になり、再帰性反射マーカーと組み合わせることで紙工作の追従も可能に。
紙という我々が最も親しみのあるメディアに対して新たに「動き」のデザインの可能性を示します。
Publication: Naoya Koizumi, Kentaro Yasu, Angela Liu, Maki Sugimoto, Masahiko Inami, "Animated paper: A toolkit for building moving toys", Computers in Entertainment (CIE) 8(2):7 (2010)
Naoya Koizumi, Kentaro Yasu, Angela Liu, Maki Sugimoto, Masahiko Inami, “Animated Paper: A Moving Prototyping Toys", 7th International Con- ference on Advances in Computer Entertainment Technology, (ACE2010), (Taiwan,November17-19, 2010)
Naoya Koizumi, Kentaro Yasu, Angela Liu, Maki Sugimoto, Masahiko Inami, “Animated Paper: A Moving Prototyping Platform”, UIST '10 Adjunct proceedings of the 23nd annual ACM symposium on User interface software and technology (UIST2010), pp.389-390, 2010.10. (New York, October 3-6, 2010)
安 謙太郎,小泉 直也,近藤 誠,朱 景華,Liu Angela,杉本 麻樹,稲見 昌彦, "Animated Paper -エネルギープロジェクタを用いた平面型ロボットの制御手法の提案-", ロボティクス・メカトロニクス講演会講演概要集 2010, "1A1-F03(1)"-"1A1-F03(4)", 2010.6 -
PINOKY
- 2011
- robotics
- embodiment
- tangible
- entertainment
PINOKY is a wireless ring-like device that can be externally attached to any plush toy as an accessory that animates the toy by moving its limbs. A user is thus able to instantly convert any plush toy into a soft robot. The user can control the toy remotely or input the movement desired by moving the plush toy and having the data recorded and played back. Unlike other methods for animating plush toys, PINOKY is non-intrusive, so alterations to the toy are not required. In a user study, 1) the roles of plush toys in the participants’ daily lives were examined, 2) how participants played with plush toys without PINOKY was observed, 3) how they played with plush toys with PINOKY was observed, and their reactions to the device were surveyed. On the basis of the results, potential applications were conceptualized to illustrate the utility of PINOKY.
本研究では、PINOKY(ピノキー)と呼ばれる、一般的なぬいぐるみの手足、尻尾などの部位を動かすことができるデバイスを開発した。デバイスはリング型で、アクセサリ感覚でぬいぐるみに取り付けることができる。本デバイスは、モータによってぬいぐるみの表面の布を外側から引っ張ることで、屈曲を実現する。従来手法は、ぬいぐるみの内部に機構を埋め込み駆動させることが一般的であった。本提案では、ぬいぐるみを切り裂くなどの加工を加えることなく、ロボット化することが可能である。本デバイスを一般のユーザに利用してもらい、容易に扱えることを確認した。また、実験結果を元にアプリケーションを作成した。 -
FuwaFuwa
- 2011
- sensing
- touch
- tangible
- daily life
FuwaFuwa: Detecting Shape Deformations on Soft Objects Using Directional Photo-reflectivity Measurements Yuta Sugiura, Gota Kakehi, Anusha Withana, Calista Lee, Daisuke Sakamoto, Maki Sugimoto, Masahiko Inami and Takeo Igarashi
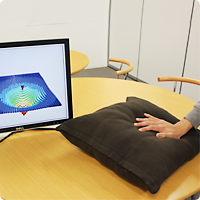
Abstract We present the FuwaFuwa sensor module, a round, hand-size, wireless device for measuring the shape deformations of soft objects such as cushions and plush toys. It can be embedded in typical soft objects in the household without complex installation procedures and without spoiling the softness of the object because it requires no physical connection. Six LEDs in the module emit IR light in six orthogonal directions, and six corresponding photosensors measure the reflected light energy. One can easily convert almost any soft object into a touch-input device that can detect both touch position and surface displacement by embedding multiple FuwaFuwa sensor modules in the object. A variety of example applications illustrate the utility of the FuwaFuwa sensor module. An evaluation of the proposed deformation measurement technique confirms its effectiveness.
Publication Yuta Sugiura, Gota Kakehi, Anusha Withana, Calista Lee, Daisuke Sakamoto, Maki Sugimoto, Masahiko Inami and Takeo Igarashi, "FuwaFuwa: Detecting Shape Deformation of Soft Objects Using Directional Photoreflectivity Measurement", In Proceedings of the 24th annual ACM symposium on User interface software and technology (UIST 2011), pp.509-516, October 16-19, Santa Barbara, CA. PDF Gota Kakehi, Yuta Sugiura, Anusha Withana, Calista Lee, Naohisa Nagaya, Daisuke Sakamoto, Maki Sugimoto, Masahiko Inami and Takeo Igarashi, "Detecting Shape Deformation on Soft Object Using Directional Photoreflectivity Measurement", In ACM SIGGRAPH 2011 Emerging Technologies (SIGGRAPH 2011), Article No.5, August 7-11, ACM, New York, NY, USA. PDF
FuwaFuwa: 反射型光センサによる柔軟物体への接触位置および圧力の計測手法の提案とその応用
杉浦 裕太、筧 豪太、Anusha Withana、Calista Lee、坂本 大介、杉本 麻樹、稲見 昌彦、五十嵐 健夫
概要 本研究では、クッションやぬいぐるみなどの柔軟な日用品に組み込むことができて、柔軟物体の柔らかさを損なわずインタラクションを計測可能なFuwaFuwa(ふわふわ)と呼ばれるセンサを開発した。綿の密度を計測する方法として、フォトリフレクタを用いる。これは、綿に赤外光を照射したときの反射光が、綿と綿の間隔の変化に伴い変化するため、計測を実現できる。これにより、柔軟物体の表面に機械的に接触するセンサを取り付けることなく、綿にかかる圧力変化を高速かつ低ヒステリシスで計測することができる。本研究では、センサをモジュール化して、容易に組み込めるようにした。さらにモジュールを複数個協調させることで、二次元平面における接触位置を計測できるマルチセンサシステムを構築した。さらに、この技術を応用してアプリケーションを作成した。
発表論文 Yuta Sugiura, Gota Kakehi, Anusha Withana, Calista Lee, Daisuke Sakamoto, Maki Sugimoto, Masahiko Inami and Takeo Igarashi,
"Detecting Shape Deformation of Soft Objects Using Directional Photoreflectivity Measurement",
In Proceedings of the 24th annual ACM symposium on User interface software and technology (UIST 2011), pp.509-516, October 16-19, Santa Barbara, CA. PDF
Gota Kakehi, Yuta Sugiura, Anusha Withana, Calista Lee, Naohisa Nagaya, Daisuke Sakamoto, Maki Sugimoto, Masahiko Inami and Takeo Igarashi,
"FuwaFuwa: Detecting Shape Deformation on Soft Object Using Directional Photoreflectivity Measurement".
In ACM SIGGRAPH 2011 Emerging Technologies (SIGGRAPH '11), Article No.5, August 7-11, ACM, New York, NY, USA. PDF
国内発表 杉浦裕太,筧豪太,ウィタナ アヌーシャ,リーカリスタ,坂本大介,杉本麻樹,稲見昌彦,五十嵐健夫,
「FuwaFuwa: 反射型光センサによる柔軟物体への接触位置および圧力の計測手法の提案とその応用」、
ロボティクス・メカトロニクス講演会2012 (ROBOMEC 2012)、ポスター、2012年5月27-29日、浜松。
杉浦裕太,筧豪太,ウィタナ アヌーシャ,リーカリスタ,坂本大介,杉本麻樹,稲見昌彦,五十嵐健夫,
「FuwaFuwa: 反射型光センサによる柔軟物体への接触位置および圧力の計測手法の提案とその応用」、
エンタテインメントコンピューティング2011 (EC2011),東京,2011年10月7-9日。 PDF 口頭発表賞 -
PukapuCam
- 2011
- sensing
- sight
- Telexistence
- entertainment
PukaPuCam is an application service which utilizes a camera attached to balloons, to capture users' unconscious activity continuously from a third-person view. PukaPuCam records the interaction between the users, their surrounding objects and even the people they meet. The direction of the balloon is influenced by the wind, air resistance and tension applied from the yarn. Through this, PukaPuCam can capture the users from random angles implicitly. This characteristic provides a fun and surprising experience when the users look back at the pictures. As compare to other methods, PukaPuCam is low-cost, has a simple configuration, is safe, does not emit noise and can be used for long-term. Furthermore, as balloons are commonly used at leisure places such as theme park, the system can be easily accepted and can blend into the surroundings.
旅のような非日常の記録だけでなく, ブログや日記をネット上で公開したり, 自分で日常のログをデジタルアーカイブする人びとが増え, 写真のみに特化した共有アプリケーションも増えている中, その写真を用いての振り返りの体験は, 思い出を記録し, 個人的な記録の想起だけでなく人と共有すること, そして自己理解や自己表現の満足感を満たすものとして価値を持ち始めている. 本論文で提案するプカプカメラは, ユーザが簡易な方法で旅のログを残すことができ, 従来の旅の記録では得られなかった気づきや振り返る体験を促すことを目的として製作・開発した. 風船にカメラを取り付けることで自分だけの「専属カメラマン」がいるかのように, ユーザを三人称視点で自動で撮影し続ける浮遊カメラと, その記録を閲覧する専用のビューワを含む複合的サービスである. 風船が風の抵抗を受け, ユーザの歩く速度に応じて傾きを変える特徴を用い, 旅をする場に存在する物や人とのインタラクションを記録する. ユーザ追随型で撮影する浮遊装置も存在しているが, 風船という一般に馴染みやすいデザインにより, 広く観光地やテーマパークで利用されること, そして風船というかわいいモチーフを利用することで, 非日常の体験をさらに楽しいものにするという体験自体の拡張を目指した. -
MetaSkin
- 2011
- sensing
- touch
- tangible
- daily life
A Thin Stretchable Interface for Tangential Force Measurement Yuta Sugiura, Masahiko Inami, and Takeo Igarashi
Abstract We have developed a simple skin-like user interface that can be easily attached to curved as well as flat surfaces and used to measure tangential force generated by pinching and dragging interactions. The interface consists of several photoreflectors that consist of an IR LED and a phototransistor and elastic fabric such as stocking and rubber membrane. The sensing method used is based on our observation that photoreflectors can be used to measure the ratio of expansion and contraction of a stocking using the changes in transmissivity of IR light passing through the stocking. Since a stocking is thin, stretchable, and nearly transparent, it can be easily attached to various types of objects such as mobile devices, robots, and different parts of the body as well as to various types of conventional pressure sensors without altering the original shape of the object. It can also present natural haptic feedback in accordance with the amount of force exerted. A system using several such sensors can determine the direction of a two-dimensional force. A variety of example applications illustrated the utility of this sensing system.
Publication Yuta Sugiura, Masahiko Inami, and Takeo Igarashi, "A Thin Stretchable Interface for Tangential Force Measurement", The 25th annual ACM symposium on User Interface Software and Technology (UIST 2012), pp.529-536, Cambridge, MA, USA, Oct. 7-10. PDF
MetaSkin: 薄くて伸縮性のある皮膚のようなインタフェース
杉浦 裕太、稲見 昌彦、五十嵐 健夫
概要 薄くて伸縮性のある皮膚のようなインタフェースを提案する。これはフォトリフレクタと伸縮性を備えた布で構成される。布に光を照射しながら伸縮させたときに、布の編み目の大きさに伴い光の透過率が変わるため反射率も変化する。この反射光をセンサで捉えることで伸縮率を計測できる。本手法は、布にセンサを接近させるだけで実現できるため、(1)これらを接着する必要がなく布の柔軟性を損なわない、(2)貼付ける対象に合わせてセンサの個数やインタフェースの面積を変更できる、(3)センサが小型で薄さを保つことができる、という特徴がある。
発表論文 Yuta Sugiura, Masahiko Inami, and Takeo Igarashi,
"A Thin Stretchable Interface for Tangential Force Measurement",
The 25th annual ACM symposium on User Interface Software and Technology (UIST 2012), pp.529-536, Cambridge, MA, USA, Oct. 7-10. PDF -
Move-it
- 2011
- display
- multi/cross modal
- tangible
- daily life
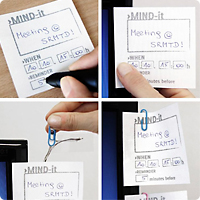
"Move-it” is constructed by some clip-shaped devices that have sensors and actuators. With this system, users can make sticky notes move by just clipping it.The recognition system using the photo interrupter module as a sensor, each clip device can recognize which note has been pinched by calculating how much infrared light is reflected by the grayscale image printed on the flip side of each note.And the actuation system that is a combination of a coil-shaped shape memory alloy and polyolefin sheet that is embedded in the clip device can provide a sufficient motion. Just writing something like "meeting 16:00" on paper using a digital pen and this system, the user can get a physical reminder without any complex setting.
Publication: Kentaro Yasu, Kathrin Probst, Maki Sugimoto, Michael Haller, Masahiko Inami, "Move-it: a paperclip-shaped sensing and actuating system for sticky notes", ROBOMECH Journal, 1(1), Article: 12. Springer International Publishing, (2014) doi:10.1186/s40648-014-0012-9 Y. Kentaro, K. Probst, M. Sugimoto, M. Haller, M. Inami. "Move-it: A Paperclip System that Provides Actuation for Sticky Notes", The Robotics and Mechatronics Conference 2013 in Tsukuba, 2A2-Q03, 2013.5 Kathrin Probst, Michael Haller, Kentaro Yasu, Maki Sugimoto, Masahiko Inami, "Move-it Sticky Notes Providing Active Physical Feedback through Motion", TEI ’14 Proceedings of the 8th International Conference on Tangible, Embedded and Embodied Interaction, pp.29-36. 2014.2. Kathrin Probst, Thomas Seifried, Michael Haller, Kentaro Yasu, Maki Sugimoto, Masahiko Inami, "Move-it: interactive sticky notes actuated by shape memory alloys", CHI Extended Abstracts 2011: 1393-1398 Y. Kentaro, K. Probst, M. Sugimoto, M. Haller, M. Inami. "Move-it: A Paperclip System that Provides Actuation for Sticky Notes", The Robotics and Mechatronics Conference 2013 in Tsukuba, 2A2-Q03, 2013.5
Move-itは付箋紙への書き込みと小型のクリップにより付箋紙からの動作の提示を可能にするシステムです。本システムによりユーザは専用の付箋紙に書き込みを行うことで動作や条件の設定を即時的に行うことができ、さらに付箋紙を変更することで条件や設定の修正、また破棄することも容易になります。ウェブ上の情報との組み合わせによる条件設定も可能なので、例えば書き込んだ用事の相手がSkypeにログインしたタイミングで動き出せば、要件の伝え忘れもなくせるかもしれません。
Publication: Kentaro Yasu, Kathrin Probst, Maki Sugimoto, Michael Haller, Masahiko Inami, "Move-it: a paperclip-shaped sensing and actuating system for sticky notes", ROBOMECH Journal, 1(1), Article: 12. Springer International Publishing, (2014) doi:10.1186/s40648-014-0012-9B
Y. Kentaro, K. Probst, M. Sugimoto, M. Haller, M. Inami. "Move-it: A Paperclip System that Provides Actuation for Sticky Notes", The Robotics and Mechatronics Conference 2013 in Tsukuba, 2A2-Q03, 2013.5
Kathrin Probst, Michael Haller, Kentaro Yasu, Maki Sugimoto, Masahiko Inami, "Move-it Sticky Notes Providing Active Physical Feedback through Motion", TEI ’14 Proceedings of the 8th International Conference on Tangible, Embedded and Embodied Interaction, pp.29-36. 2014.2.
Kathrin Probst, Thomas Seifried, Michael Haller, Kentaro Yasu, Maki Sugimoto, Masahiko Inami, "Move-it: interactive sticky notes actuated by shape memory alloys", CHI Extended Abstracts 2011: 1393-1398
Y. Kentaro, K. Probst, M. Sugimoto, M. Haller, M. Inami. "Move-it: A Paperclip System that Provides Actuation for Sticky Notes", The Robotics and Mechatronics Conference 2013 in Tsukuba, 2A2-Q03, 2013.5 -
Shader Printer
- 2012
- display
- sight
- prototyping
- daily life
Shader Printer Daniel Saakes, Masahiko Inami, Takeo Igarashi, Naoya Koizumi, Ramesh Raskar
Abstract We introduce a novel concept of a stateful projector display that uses bi-stable color changing inks. We augment non-planar and complex painted surfaces by projecting high resolution imagery that persist on target surfaces, last without requiring additional power, and are rewritable. Our ”shader printer” concept is useful for various applications that are not catered by traditional displays or fabrication technologies. For instance, fashion items such as shoes or bags, wallpapers, and floors can be updated frequently. Design prototypes can be tested outside the laboratory environment in outdoors and in real-use scenarios. Another application could be very large size, high resolution information displays that are constantly updated.
Publication Daniel Saakes, Masahiko Inami, Takeo Igarashi, Naoya Koizumi, Ramesh Raskar, "Shader Printer", The 39th International Conference and Exhibition in Computer Graphics and Interactive Techniques, SIGGRAPH 2012 Emerging Technologies Article No.18, Los Angeles, Aug. 5-9, 2012. PDF
Link Reviews on the Run: Shader Printer flickr: Shader Printer engadet NEWS Aug 8th 2012
Shader Printer: サーモクロミックインクとレーザーを利用した投影型印刷技術
Daniel Saakes, 稲見 昌彦、五十嵐 健夫, 小泉 直也, Ramesh Raskar
概要 "Shader Printer"はサーモクロミックインクとレーザーを利用した投影型印刷技術である。本システムでは、複雑な自由曲面に対する高解像度でかつ半永久的に定着するプロジェクション手法を提案する。投影された画像は一般のディスプレイシステムのように電源を必要とはせず、かつ何度でも書き換え可能である。 このコンセプトは様々な対象に対して利用可能であり、靴・バッグ・壁紙・床などの模様を自由に書き換えすることが可能になる。また、靴などの模様のプロトタイプを本システムを使い印刷すれば実際に外に持ち出すことができる。 さらに、レーザーを使用しているため建物や自動車などを巨大スクリーンとして捉え、そこに投影して書き換えを行うことも可能である。
発表文献 Daniel Saakes, Masahiko Inami, Takeo Igarashi, Naoya Koizumi, Ramesh Raskar,
"Shader Printer",
The 39th International Conference and Exhibition in Computer Graphics and Interactive Techniques, SIGGRAPH 2012 Emerging Technologies Article No.18, Los Angeles, Aug. 5-9, 2012. PDF
リンク Reviews on the Run: Shader Printer
flickr: Shader Printer
engadet NEWS Aug 8th 2012
Wise 9 -
POPAPY
- 2012
- robotics
- multi/cross modal
- tangible
- entertainment
POPAPY Daniel Saakes, Masahiko Inami, Takeo Igarashi, Naoya Koizumi, Ramesh Raskar
POPAPY is an instant paper craft that is made up in a microwave oven. With ordinary paper and designed special sheet, we can get 3D paper craft by 1-minute microwave cooking.
The special sheet is made from a combination of two materials, heat-shrinkable sheet and microwave-safe aluminum sheet. The aluminum sheet absorbs microwaves and provides heat energy to the heat-shrinkable sheet efficiently. Then the shrinking sheet bends and folds the paper. We established design method for the bending angle and bending timing by changing the size of the two materials.
Publication: Kentaro Yasu, Masahiko, Inami, (2014). "POPAPY", Ars Electronica 2014 Festival for Art, Technology, and Society. pp.106, ISBN: 978-3-7757-3849-1 http://www.aec.at/center/en/2014/09/02/popapy/ Kentaro Yasu, Masahiko Inami, "POPAPY", ACM SIGGRAPH 2012 Studio Projects, (Los Angeles, 2012. 8.5-9) 2012.8 (Demo) Kentaro Yasu, Masahiko Inami, “POPAPY:Instant Paper Craft Made Up in a Microwave Oven”, 9th International Conference of Advances in Computer En- tertainment (ACE2012), Lecture Notes in Computer Science vol.7624, pp.406- 420, 2012. [Bronze Creative Showcase Award] ◯安 謙太郎, 稲見 昌彦, ”POPAPY: 電子レンジの加熱によって作成するペーパークラフトの設計手法 ”,エンタテインメントコンピューティング 2012 論文集, pp283-290,2012 年 9 月,(査読有り)【論文賞】【芸術科学会賞】 (2012/09/28-30@神戸大学)[pdf] ◯楊 尚樺, 安 謙太郎, 稲見 昌彦, “POPAPY:電子レンジを用いてペーパーフィギュアへと変形する ポストカードのデザイン ”, 第 23 回 情報処理学会 エン タテインメントコンピューティング研究会 研究発表会, セッション 3: 実世界, (8), 2012 年 3 月.
-
Cuddly
- 2013
- interaction
- multi/cross modal
- tangible
- entertainment
We proposed a display technology that utilizes the phenomenon whereby the shading properties of fur change as the fibers are raised or flattened. One can erase drawings by first flattening the fibers by sweeping the surface by hand in the fiber's growth direction, and then draw lines by raising the fibers by moving the finger in the opposite direction. These material properties can be found in various items such as carpets in our living environments. We have developed three different devices to draw patterns on a “fur display” utilizing this phenomenon: a roller device, a pen device and pressure projection device. Our technology can turn ordinary objects in our environment into rewritable displays without requiring or creating any non-reversible modifications to them. In addition, it can be used to present large-scale image without glare, and the images it creates require no running costs to maintain.
Graduate School of Media Design, Keio University:http://www.kmd.keio.ac.jp/en/
Project Members: Yuta Sugiura, Koki Toda, Takayuki Hoshi, Youichi Kamiyama, Takeo Igarashi and Masahiko Inami.
References: Yuta Sugiura, Koki Toda, Takayuki Hoshi, Youichi Kamiyama, Takeo Igarashi and Masahiko Inami. 2014. Graffiti Fur: Turning Your Carpet Into a Computer Display. In Proceedings of the 27th annual ACM symposium on User interface software and technology (UIST '14). (To appear)
Yuta Sugiura, Koki Toda, Takayuki Hoshi, Masahiko Inami, and Takeo Igarashi. 2014. Graffiti Fur: Turning Your Carpet Into a Computer Display. In ACM SIGGRAPH 2014 Emerging Technologies (SIGGRAPH '14).
Download Photos: https://dl.dropboxusercontent.com/u/5... https://dl.dropboxusercontent.com/u/5...
Cuddlyは、スマートフォンの圧力センシングを用いてぬいぐるみ等の柔軟物とインタラクションを可能とするアプリケーションです。柔軟物にアプリを起動したスマートフォンを入れるだけで、手軽に柔軟物の押しつぶされ具合を計測出来、押したり握ったりといった動作に対し、音声や映像で反応を返すことが出来ます。 -
MyRin
- 2013
- robotics
- multi/cross modal
- prototyping
- entertainment
MyRin: 二次元通信シートを用いた近接エネルギー供給の時空間操作によるロボットの制御
-
Graffiti Fur
- 2014
- display
- sight
- tangible
- daily life
"In this research, we propose an interactive device where users can draw any pictures or characters on the carpet as they like. To
implement this system, we utilize the lighting and shading properties of the carpet when one rubs the surface from a constant
direction. These properties leave tracks on the carpet. As it is needless to modify the carpet, user can redraw patterns and
characters many times while maintaining the texture of the carpet."
"本研究では,絨毯などの表面に任意の絵や文字を描画できるインタラクティブなデバイスを提案する.提案するデ
バイスは,絨毯を指などで一定の方向になぞる際に濃淡の度合いが異なる跡ができる現象を利用し,ドット絵のよう
に一定の間隔で絨毯をなぞることで絨毯の濃淡差により絵や文字のパターンを出して絨毯への描画を実現する.絨毯
には特別な加工を施さないため,絨毯の質感を保ちつつ,何度も絵や文字を書き換えていくことが可能となる." -
プクプカメラ
- 2014
- sensing
- sight
- Telexistence
- entertainment
" プクプカメラ:ダイビングにおける三人称視点からの遊泳記録手法 (2014,AH 2015 poster).
発表文献
" -
Gravity Spice
- 2014
- interaction
- multi/cross modal
- AR/MR/DR
- foods
Gravity Spice: Entertainment System by Changing the Weight of Food Interactively. The flavor of food is not just limited to the sense of taste, but it changes according to the perceived information from other perception such as from the auditory, visual, tactile sense or through individual experience or cultural background etc. Our proposed entertainment system "Gravity Spice" focuses on the cross modal of our perception, where we perceive the weight of food when we carry the utensil. This system consist of a fork and a seasoning called the "OMOMI". User can change the weight of the fork when flaking the seasoning onto it. Through this sequence of actions, user can enjoy a different eating experience, which may change the taste of their food or the feeling of the food when they are chewing it.
"おもみ調味料グラビトミン酸: 食材のバーチャルな重さの制御を利用した知覚変化システム (2014.5-,AH 2015)
概要
味わいは味覚だけでなく聴覚,視覚,触覚,あるいは個人の経験や文化的背景など,様々な情報に基づいて知覚される感覚である.我々は食事の動作の中から,食器を通じて知覚する食材の重みと,そこから引き起こされるクロスモーダルに着目し,フォークと調味料で構成されたエンターテイメントシステム 「おもみ調味料グラビトミン酸」 を制作した.この装置を使えば,体験者自らが ""おもみ"" という調味料を振りかけるインタラクションを行いながら,食品の重みを変化させることができる.この一連の動作により,触覚情報である食品の重みの変化から引き起こされる,味覚や歯応えの変化を知覚することで,普段と異なる食体験を楽しむことができる.
発表文献
廣瀬雅治,武田港,野尻梢,岩崎花梨,杉浦裕太,稲見昌彦,おもみ調味料グラビトミン酸: 食材のバーチャルな重さの制御を利用した知覚変化システム,特集論文 ハプティックコンテンツ,バーチャルリアリティ学会論文誌,vol.19,No.4,2014." -
透明プリウス
- 2012
- display
- sight
- AR/MR/DR
- transportation
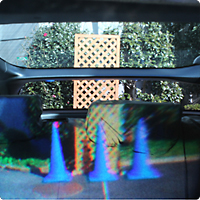
"概要
車の壁を視覚的に透明にすることによって、車両操作性の向上を目指して行いました。
このシステムを利用することによって、車内から車外を、まるで車の内部が透明になったかのように見ることが出来るようになります。
発表文献
•Chang Shian Wei,上間 裕二,小泉 直也,南澤 孝太,杉本 麻樹,稲見 昌彦, ThroughView A Visual Assistance System for Reverse Driving using Retro-reflective Projection Technology, 第17回バーチャルリアリティ学会論文集, pp564 - 565 (慶應義塾大学日吉キャンパス, 2012年9月14日)
◦GN185.pdf
◦第17回VRSJ
" -
Rojikoma × Optical Camouflage
- 2014
- display
- sight
- AR/MR/DR
- entertainment
Rojikoma × Optical Camouflage.
ロジコマ光学迷彩 -
音手
- 2011
- robotics
- touch
- entertainment
"等身大拍手マシン
軟質ウレタンの肉とアルミニウムの骨でできた人工の手を叩き合わせることで「パチパチ」というリアルな拍手の音を出すことに成功しました。
音楽に合わせて手拍子させたり、遠隔操作で拍手を遠くに伝えたり意外と使えます。"